
роботы 
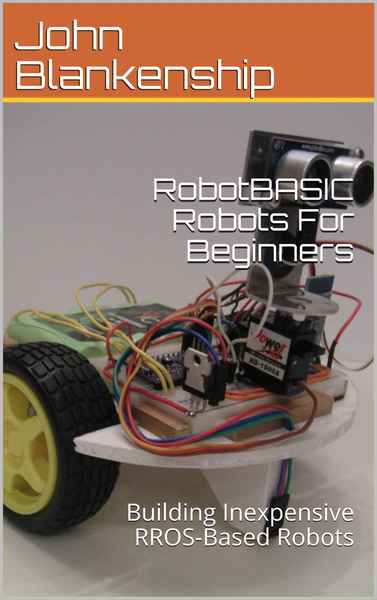
Building Inexpensive RROS-Based Robots
Не так давно было очень сложно построить робота, способного к интересному поведению, потому что вам приходилось самому проектировать и строить почти все. Сегодня робототехника может быть фантастическим хобби почти для всех, потому что технология продвинулась до такой степени, что большинство сложных вещей, которые вам нужны, можно купить по разумным ценам. К сожалению, даже если вы приобрели необходимые датчики и контроллеры двигателей, вам все равно нужно связать их с микроконтроллером и написать сложные драйверы для обработки всех сообщений, времени и прерываний, прежде чем вы сможете начать создавать приложения для роботов. По крайней мере, так делали до сих пор. Операционная система для роботов RobotBASIC (RROS) предоставляет аппаратный интерфейс и все низкоуровневое программное обеспечение, необходимое для различных датчиков и двигателей в одном 24-контактном чипе. Поскольку чип делает для вас всю тяжелую работу, опытные любители могут создавать интересных роботов за пару часов.
brij 16/10/17 Просмотров: 2833 Комментариев: 0
+2
Знаете ли вы, как лучше всего использовать компьютер Arduino? Вы можете пробудить жизнь в своем роботе с помощью этого мощного маленького сердца. В этой книге вы узнаете основы создания роботов на основе Arduino. Преимущества использования Arduino - это то, что он очень удобен для пользователя. Любой новичек с нулевым уровнем в электронике и программировании теперь может научиться программировать роботов.
brij 12/10/17 Просмотров: 3791 Комментариев: 0
+2
Роботы наступают! Мир робототехники стремительно развивается, механизмы становятся все совершеннее. Роботы научились управлять самолетами и поездами, проводить сложные хирургические операции, стричь газоны и многое другое. Хотите знать о них больше?
tanyavip1 01/10/17 Просмотров: 2377 Комментариев: 0
0

Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 29/09/17 Просмотров: 3591 Комментариев: 0
+2
Volume 2
Эта книга представляет собой сборник лучших проектов и статей из журнала Make.
Ниже приведен список тем в книге: обустройте свою мастерскую и сделайте некоторые необходимые инструменты, создайте электронные проекты от сервоприводов до антенн, сделайте проекты с Arduino и Raspberry Pi, создайте беспилотные летательные аппараты и роботов, создайте проекты усилителей и музыкальные инструменты, увеличьте возможности фото и видео, сделайте свое мыло и многое другое.
brij 30/08/17 Просмотров: 4476 Комментариев: 2
+3

Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 26/08/17 Просмотров: 3655 Комментариев: 0
+3
Электроника →
Саймон Монк. Мейкерство. Arduino и Raspberry Pi. Управление движением, светом и звуком

Твори, выдумывай, пробуй!
Рассказано, как самостоятельно создавать устройства на основе популярных платформ Arduino и Raspberry Pi. Излагаются принципы работы описываемых устройств. Сложные задачи решаются последовательно, через выполнение экспериментов и реализацию увлекательных проектов. Рассказано, как управлять светодиодными индикаторами, электродвигателями различных типов, соленоидами, агрегатами переменного тока, нагревателями, охладителями, дисплеями и звуковыми устройствами.
Bookingolz 26/08/17 Просмотров: 6569 Комментариев: 0
+12
Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 25/07/17 Просмотров: 3536 Комментариев: 0
+1
Читатель узнает о том, как автоматы управляют самолетами и космическими аппаратами, как они "научились" играть в шахматы и сочинять музыку, "говорить" и "понимать" человеческую речь, а также о том, какими они станут в будущем.
Swimming1 07/07/17 Просмотров: 4208 Комментариев: 0
0
Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 20/06/17 Просмотров: 3674 Комментариев: 0
+1
Raspberry Pi - небольшая, недорогая, но очень мощная платформа разработки. Он применяется для взаимодействия с электроникой для разнообразных вариантов использования, в основном для автоматизации дома и робототехники. Наша книга представляет собой руководство, которое покажет вам, как использовать GPIO от Raspberry Pi с Java.
 техника,
PDF,
Java Runtime Environment,
железо,
технологии,
роботы,
информатика,
обучение,
аппаратура,
Raspberry Pi
техника,
PDF,
Java Runtime Environment,
железо,
технологии,
роботы,
информатика,
обучение,
аппаратура,
Raspberry Pi
brij 07/06/17 Просмотров: 3816 Комментариев: 0
+1
Книга состоит из описаний простых конструкций, содержащих электронные компоненты, и экспериментов с ними. Кроме традиционных конструкций, чья логика работы определяется их схемотехникой, добавлены описания изделий, функционально реализующихся с помощью программирования. Тематика изделий — электронные игрушки и сувениры.
Книга будет полезна начинающим электронщикам разного возраста, как пособие по изготовлению практических изделий и экспериментированию.
Bookingolz 01/06/17 Просмотров: 8051 Комментариев: 2
+7

Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 25/05/17 Просмотров: 3594 Комментариев: 0
+1
Это практическое руководство для тех, кто делает первые шаги в робототехнике на платформе Arduino.
С этой книгой вы разберетесь в основах электроники, научитесь программировать в среде Arduino IDE, работать с печатными платами Arduino, инструментами, паяльником, соблюдать правила безопасности и многому другому.
tanyavip1 27/04/17 Просмотров: 4018 Комментариев: 0
+2
Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 22/04/17 Просмотров: 3366 Комментариев: 0
0

Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 24/03/17 Просмотров: 3390 Комментариев: 0
+1

Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 23/02/17 Просмотров: 3724 Комментариев: 0
+1
Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 21/01/17 Просмотров: 3634 Комментариев: 0
+1

Ежемесячный популярный американский журнал, посвященный роботостроению и кибернетике, предлагает огромное количество примеров создания роботов различной направленности - от игрушек до серьезных устройств, а также различные схемные, технические, теоретические и практические решения по созданию, настройке, регулировке и практическому использованию роботов.
gefexi 23/12/16 Просмотров: 3596 Комментариев: 0
0
Учебное пособие посвящено актуальным вопросам проектирования, исследования, алгоритмического и программного обеспечения информационных устройств и систем (ИУС), используемых в робототехнике и мехатронике. В книге подробно рассмотрены общие сведения об информации ИУС, метрологическом обеспечении и проектировании ИУС.
shkiper-HAI 30/11/16 Просмотров: 2108 Комментариев: 0
+1